Training HNNs without backpropagation
Table of Contents
Hamiltonian neural networks (HNNs) 1 are a smart way to incorporate physical knowledge into neural networks. In this post we will dive into the main ideas behind our paper2 and talk about what is exciting in this line of work! If you are not familiar with HNNs or sampling neural networks I hope this post also gives you an intuition behind their concepts and which problems they address. This post also contains code examples that I encourage you to code along and have fun! You can find the code in notebooks as reference. Note that the code provided here is for explanation purposes, you can checkout the code link below to reproduce the experiments from the paper.
We have trained HNNs by sampling the hidden layer parameters using data-agnostic and data-driven sampling methods and solving a linear system to fit the last linear layer parameters. The linear equation incorporates Hamilton's equations by design, therefore maintains HNN properties like energy conservation. We have also evaluated different algorithms for the sampling part and compared the performance of the sampled HNNs against iteratively (gradient-descent-based) trained HNNs. We have seen very accurate approximations from the sampled HNNs compared to traditionally trained HNNs, and the data-driven sampling is superior to data-agnostic sampling when the target function has large gradients or large input domain in our numerical experiments.
Introduction: Introduces Hamiltonian systems and how to solve them using numeric methods with examples.
Method: Explains the key idea of utilizing sampling algorithms for training HNNs.
Results & Discussion: Shows some of our results from the paper and concludes this post.
For detailed explanation you can check out the sections you find interesting from the table of contents.
Introduction
Our recent paper, “Training Hamiltonian neural networks without backpropagation”, introduces an approach that does just that. By leveraging data-driven methods, we achieve both high accuracy and high speed in training HNNs. Here’s a deep dive into the ideas, methods and results that make this work so exciting.
Hamiltonian systems
Hamiltonian systems are the heart of modeling physical phenomena from pendulum to planetary motion. And there is more, Hamiltonian systems are not just encountered in physics, there are Hamiltonian systems and their analysis in economics (Pontryagin’s maximum principle), biology (Lotka-Volterra), and many more. What’s more exciting is we can model these systems directly from data, e.g. by using neural networks as we will see in a moment. This provides us a way to learn these systems (and solve them) without knowing the underlying equations of motion.
At the core, Hamiltonian systems are defined by a scalar valued Hamiltonian function which maps the state of the system into a conserved quantity (e.g. energy in mechanical systems). Using Hamilton’s equations 3 (and knowing the Hamiltonian function) we can retrieve the equations of motion of the system. Therefore, we are usually interested in knowing (or approximating) Hamiltonian functions.
Now, let’s focus on the goal of approximating Hamiltonian functions, that is, functions that describe equations of motions to many dynamical systems. Let’s inspect one simple example Hamiltonian system from mechanics: Mass-spring system, where the Hamiltonian function value describes the conserved total ’energy’ of the system.
Click to see the code
import numpy as np
import matplotlib as mpl
import matplotlib.pyplot as plt
GOLDEN_RATIO = (1 + 5**0.5) / 2 # for plotting
def spring_hamiltonian(x):
# H(q,p) = 1/(2m) * p^2 + k/2 (q-L)^2
# with Mass m=1, Spring constant k=1, natural spring length L=1
# H(q,p) = 0.5 * p^2 + 0.5 * (q-1)^2
q, p = np.split(x, 2, axis=-1)
return 0.5 * p**2 + 0.5 * (q-1)**2
# visualize system
q = np.linspace(-5, 5, 1000)
p = np.linspace(-5, 5, 1000)
qs, ps = np.meshgrid(q, p, indexing="ij")
x = np.column_stack([qs.flatten(), ps.flatten()])
Hx = spring_hamiltonian(x)
fig, ((ax0)) = plt.subplots(1, 1, figsize=(4, 2*GOLDEN_RATIO), dpi=100)
im = ax0.contourf(q, p, Hx.reshape(q.size, p.size).T)
fig.colorbar(im, ax=ax0)
ax0.set_title(r"$\mathcal{H}(q,p)$")
ax0.set_xlabel(r"$q$")
ax0.set_ylabel(r"$p$", rotation=0)
ax0.set_xticks(list(range(-5, 6)))
ax0.set_yticks(list(range(-5, 6)))
fig.tight_layout()
fig.savefig("../../static/images/posts/training-hnns-without-backprop/mass-spring-true-hamil.png")
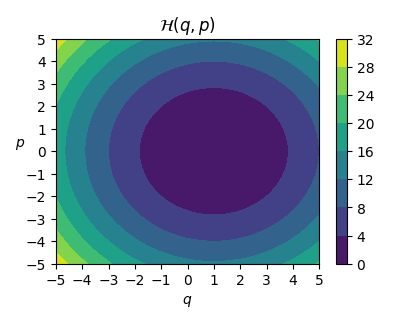
When the constants are set (see the code for details) we get the target function as: $$ \mathcal{H}(q,p) = \frac{p^2}{2} + \frac{(q-1)^2}{2}, $$ where $\mathcal{H}: \mathbb{R}^2 \rightarrow \mathbb{R}$ is the Hamiltonian function.
Usually we are interested in solving the system given an initial position $x_0 = (q_0, p_0)$. The equations of motion can be recovered using the Hamilton’s equations:
$$ \dot{q} = \partial \mathcal{H} / \partial p $$
and
$$ \dot{p} = -\partial \mathcal{H} / \partial q, $$
that is, we can recover $\dot{q} = \partial{q} / \partial{t}$ and $\dot{p} = \partial{p} / \partial{t}$ from the partial derivatives of the Hamiltonian function value w.r.t. $q$ and $p$, which describe the evolution of our system. What this means is, we can use the time derivatives to ‘solve’ the system for any given initial condition $x_0 = (q_0,p_0)$, e.g. by applying the forward Euler method to compute the next state of the system at $x_1 = (q_1,p_1) = (q_0 + \Delta t \cdot \dot{q}_0, p_0 + \Delta t \cdot \dot{p}_0)$ and continue this process until a trajectory $(x_0, x_1, \dots, x_N )$ is approximated.
Let’s approximate the trajectory for the initial state $x_0 = (1.5, 0)$ using forward Euler as it is quite straightforward to implement.
Click to see the code
def dH(x):
"""
partial derivatives of H w.r.t. q and p
dHdq = 0.5 * 2*(q-1) = q-1
dHdp = 0.5 * 2*p = p
returns the gradient dHdx = [dHdq, dHdp]
"""
q, p = x[0], x[1]
return np.array([q - 1, p])
def hamiltons_equations(dHdx):
"""
returns time derivatives [dqdt, dpdt]
using Hamilton's equations
"""
dHdq, dHdp = dHdx[0], dHdx[1]
q_dot, p_dot = dHdp, -dHdq
return np.array([q_dot, p_dot])
def forward_euler(x, dt):
"""
x_next = x_prev + dt * x_prev_dot
"""
dHdx = dH(x)
dxdt = hamiltons_equations(dHdx)
return x + dt * dxdt
dt = 1e-2
traj_length = 2000
x_0 = np.array([1.5, 0.])
forward_euler_traj = [x_0]
for _ in range(traj_length-1):
x = forward_euler_traj[-1]
x_next = forward_euler(x, dt)
forward_euler_traj.append(x_next)
forward_euler_traj = np.array(forward_euler_traj)
hamiltonian_values = spring_hamiltonian(forward_euler_traj)
fig, ((ax0, ax1)) = plt.subplots(1, 2, figsize=(8, 2*GOLDEN_RATIO), dpi=100)
ax0.plot(range(1, traj_length+1), forward_euler_traj[:,0], label=r"$q$")
ax0.plot(range(1, traj_length+1), forward_euler_traj[:,1], label=r"$p$")
ax0.set_title(r"Forward Euler")
ax0.set_xlabel(r"time step")
ax0.legend()
ax1.plot(range(1, traj_length+1), hamiltonian_values)
ax1.set_xlabel(r"time step")
ax1.set_title(r"$\mathcal{H}(q,p)$")
fig.tight_layout()
fig.savefig("../../static/images/posts/training-hnns-without-backprop/mass-spring-forward-euler.png")
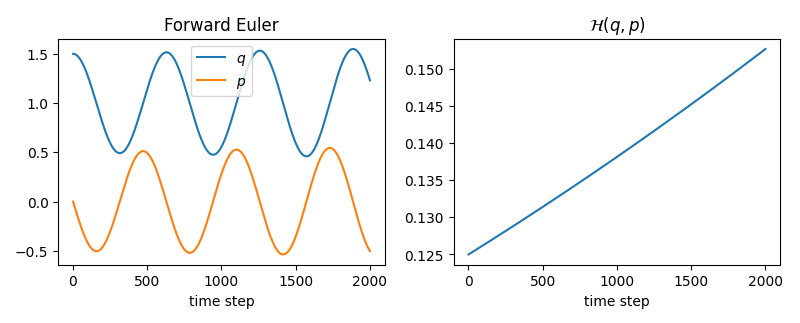
We notice that the Hamiltonian value (total energy of the system) diverges on the right plot. However, we did not ‘add’ or ‘remove’ energy (we are dealing with a closed system), so why does this happen? This is due to the forward Euler integration, which does not have conserving properties. When dealing with Hamiltonian systems we should therefore resort to symplectic integrators with conserving properties. The flow map (evolution operator in our case) of a Hamiltonian system is a symplectic map. Let’s try the symplectic Euler integration method and see the difference.
Click to see the code
def symplectic_euler(x, dt):
"""
mass-spring is a separable system:
- q_dot depends only on p, (q_dot = dHdp(_, p) = p)
- p_dot depends only on q. (p_dot = -dHdq(q, _) = q-1)
q_next = q_prev + dt * q_dot(p_prev)
p_next = p_prev + dt * p_dot(q_next)
Uses x_next (p_dot only depends on q_next)
in the update for p_next
"""
dHdx = dH(x)
dxdt = hamiltons_equations(dHdx)
dqdt = dxdt[0]
# update q
q, p = x[0], x[1]
q_next = q + dt * dqdt
dHdx_next = dH(np.array([q_next, p]))
dxdt_next = hamiltons_equations(dHdx_next)
dpdt_next = dxdt_next[1]
# update p
p_next = p + dt * dpdt_next
return np.array([q_next, p_next])
dt = 1e-2
traj_length = 2000
x_0 = np.array([1.5, 0.])
symplectic_euler_traj = [x_0]
for _ in range(traj_length-1):
x = symplectic_euler_traj[-1]
x_next = symplectic_euler(x, dt)
symplectic_euler_traj.append(x_next)
symplectic_euler_traj = np.array(symplectic_euler_traj)
hamiltonian_values = spring_hamiltonian(symplectic_euler_traj)
fig, ((ax0, ax1)) = plt.subplots(1, 2, figsize=(8, 2*GOLDEN_RATIO), dpi=100)
ax0.plot(range(1, traj_length+1), symplectic_euler_traj[:,0], label=r"$q$")
ax0.plot(range(1, traj_length+1), symplectic_euler_traj[:,1], label=r"$p$")
ax0.set_title(r"Symplectic Euler")
ax0.set_xlabel(r"time step")
ax0.legend()
ax1.plot(range(1, traj_length+1), hamiltonian_values)
ax1.set_xlabel(r"time step")
ax1.set_title(r"$\mathcal{H}(q,p)$")
fig.tight_layout()
fig.savefig("../../static/images/posts/training-hnns-without-backprop/mass-spring-symplectic-euler.png")
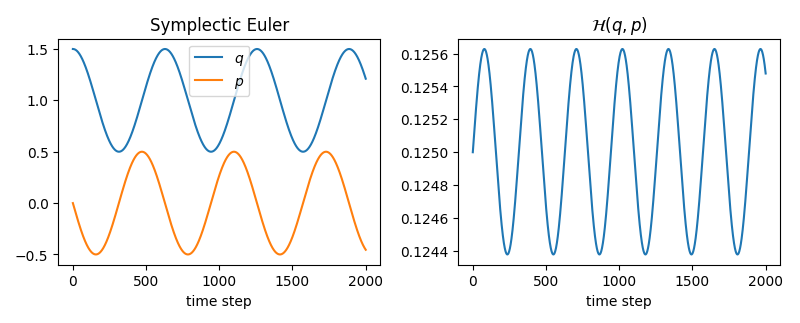
With this we also make a sanity check of our implementation and see the harmonic – oscillating motion of the harmonic mass-spring system.
Great! Now we have a system that we can analytically integrate using the true Hamiltonian function and approximate trajectories given any initial state of the system. We can even create animations.
Click to see the code
from IPython.display import HTML
from matplotlib.animation import FuncAnimation
# focused visualization of the system
q = np.linspace(-2, 2, 1000)
p = np.linspace(-2, 2, 1000)
qs, ps = np.meshgrid(q, p, indexing="ij")
x = np.column_stack([qs.flatten(), ps.flatten()])
Hx = spring_hamiltonian(x)
fig, ((ax0)) = plt.subplots(1, 1, figsize=(4, 2*GOLDEN_RATIO), dpi=100)
im = ax0.contourf(q, p, Hx.reshape(q.size, p.size).T)
fig.colorbar(im, ax=ax0)
ax0.set_title(r"$\mathcal{H}(q,p)$")
ax0.set_xlabel(r"$q$")
ax0.set_ylabel(r"$p$", rotation=0)
ax0.set_xticks(list(range(-2, 3)))
ax0.set_yticks(list(range(-2, 3)))
# plot params
scatter_size = 1.5
color = "red"
alpha = 0.05
scat = ax0.scatter(symplectic_euler_traj[0,0], symplectic_euler_traj[0,1], c=color, s=scatter_size, label="Symplectic Euler", alpha=alpha)
ax0.legend()
fig.tight_layout()
num_frames = 50
batch_size = int(len(symplectic_euler_traj) / 50)
def update(frame):
idx = frame * batch_size
scat.set_offsets(symplectic_euler_traj[:idx])
return scat
ani = FuncAnimation(fig=fig, func=update, frames=num_frames, interval=50)
plt.close()
ani.save("../../static/images/posts/training-hnns-without-backprop/mass-spring-integration-anim.gif", "imagemagick")
HTML(ani.to_jshtml())
Visualizing physical systems by creating plots and animations is in my opinion very interesting and fun to play around and luckily Hamiltonian systems gives us a broad range of plotting opportunities.
Now let’s focus on the questions we might be asking at this point:
Given a dataset $\lbrace q_i, p_i, \dot{q}_i, \dot{p}_i \rbrace _{i=1}^{K}$ we could be interested in modeling the single pendulum system. We could model this system using a neural network as an ODE-Net that takes $q$ and $p$ as input and outputs $\dot{q}$ and $\dot{p}$ directly. This way, after training the model we should be able to query the time derivative information at any state of the system, and use an integrator to approximate the evolution of the system given any initial condition. However, by doing so, we neglect the Hamiltonian function and the underlying physics: Hamilton’s equations! Recent work (HNNs) compared HNNs with plain ODE-Nets. Let’s see how HNNs are traditionally constructed in the following.
Hamiltonian neural networks
We re-iterate our question to:
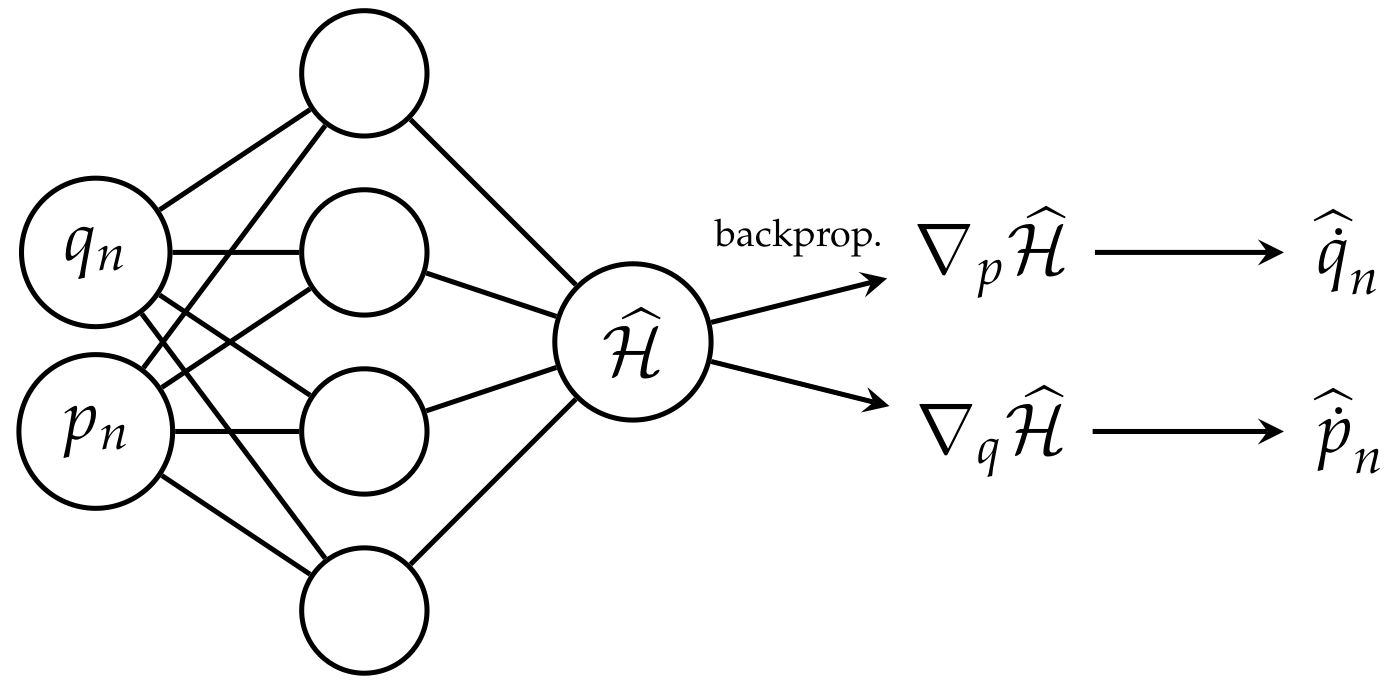
HNNs directly approximate the Hamiltonian function from data and use automatic differentiation to retrieve the partial derivatives of the model w.r.t to its inputs $q$ and $p$ at any state of the system. They are also trained with a custom loss function incorporating the Hamilton’s equations:
$$ \mathcal{L} = \bigg\lVert \frac{\partial \widehat{\mathcal{H}}}{\partial p} - \frac{\partial q}{\partial t} \bigg\rVert_2 + \bigg\lVert \frac{\partial \widehat{\mathcal{H}}}{\partial q} + \frac{\partial p}{\partial t} \bigg\rVert_2, $$
where $\widehat{\mathcal{H}}$ is parameterized by a neural network, and it approximates the target Hamiltonian function. After training, HNNs can retrieve both the conserved state of the system (the Hamiltonian) and the time derivatives of $q$ and $p$ by applying the Hamilton’s equations on the gradients of the model’s output (retrieved through automatic differentiation).
HNNs studies the question above, and can directly use the Hamilton’s equations thus incorporating our physical knowledge into the approximation! Let’s train an HNN to approximate the mass-spring Hamiltonian function.
Click to see the code for imports and HNN training constants
import os
import torch
import torch.nn as nn
from torch.optim import Adam
from time import time
# For ADAM training
SEED_TORCH = 91234
DEVICE = 'cuda' # choose accordingly to our hardware 'cpu' or 'cuda'
NUM_TRAIN_STEPS = 20000
BATCH_SIZE = 512
LEARNING_RATE = 5e-4
WEIGHT_DECAY = 1e-13
NUM_HIDDEN_NEURONS = 1000
torch.manual_seed(SEED_TORCH)
torch.set_default_dtype(torch.float64)
torch.set_num_threads(os.cpu_count())
Click to see the code for data generation
import numpy as np
# For generating data
SEED_DATA = 752123
RNG = np.random.default_rng(SEED_DATA)
NUM_POINTS = 10000
TRAIN_SPLIT = 0.8 # means we use 80% of the data for training
# 20% of the data for testing
def dxdt(x):
# gradient of the mass-spring Hamiltonian w.r.t. input:
# returns dx/dt = (dq/dt, dp/dt) (time derivative of input)
q, p = np.split(x, 2, axis=-1)
dHdq, dHdp = q-1, p
# Hamilton's equations
dqdt, dpdt = dHdp, -dHdq
return np.column_stack([dqdt.flatten(), dpdt.flatten()])
qs = RNG.uniform(low=-5, high=5, size=(NUM_POINTS))
ps = RNG.uniform(low=-5, high=5, size=(NUM_POINTS))
x = np.column_stack([qs.flatten(), ps.flatten()])
# Shuffle
idx = RNG.permutation(x.shape[0])
x = x[idx]
# Train/Test split
split_idx = int(x.shape[0] * TRAIN_SPLIT)
x_train, x_test = x[:split_idx], x[split_idx:]
x_dot_train = dxdt(x_train)
# We assume we know the Hamiltonian at one point
# to correctly set the integration constant.
# Here we assumed we know where 'energy' is zero:
# -> At the equilibrium.
x0_train = np.array([[1.,0.]])
H0_train = spring_hamiltonian(x0_train) # equals zero
# Ground truths
y_train = spring_hamiltonian(x_train)
y_test = spring_hamiltonian(x_test)
Click to see the code for HNN implementation
class MLP(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim):
super(MLP, self).__init__()
self.flatten = nn.Flatten()
self.linear1 = nn.Linear(input_dim, hidden_dim)
self.activation = nn.Tanh()
self.linear2 = nn.Linear(hidden_dim, output_dim)
def init_params(self):
nn.init.xavier_normal_(self.linear1.weight)
nn.init.zeros_(self.linear1.bias)
nn.init.xavier_normal_(self.linear2.weight)
nn.init.zeros_(self.linear2.bias)
def forward(self, x):
x = self.flatten(x)
# dense layer
x = self.linear1(x)
x = self.activation(x)
# linear layer
x = self.linear2(x)
return x
class HNN(nn.Module):
def __init__(self, input_dim, hidden_dim):
super(HNN, self).__init__()
self.mlp = MLP(input_dim, hidden_dim, 1)
def init_params(self):
self.mlp.init_params()
def forward(self, x):
hamil = self.mlp(x)
# Auto-diff
hamil_dx = torch.autograd.grad(hamil.sum(), x, create_graph=True)[0]
hamil_dq, hamil_dp = torch.split(hamil_dx, hamil_dx.shape[1] // 2, dim=1)
# Hamilton's equations
q_dot = hamil_dp
p_dot = -hamil_dq
return torch.cat((q_dot, p_dot), dim=1)
Click to see the code for optimization loop
def get_batch(x, step, batch_size, requires_grad=False):
x_len, _ = x.shape
i_begin = (step * batch_size) % x_len
x_batch = x[i_begin:i_begin + batch_size, :]
return torch.tensor(x_batch, requires_grad=requires_grad, device=DEVICE)
def train_step(model, optim, x, x_dot_true, idx_step):
x_dot_pred = model.forward(x)
loss = (x_dot_true - x_dot_pred).pow(2).mean()
loss.backward(); optim.step(); optim.zero_grad()
if idx_step % 1000 == 0:
print(f"-> Loss at step {idx_step}\t:\t{loss}")
return loss.item()
def adam_train(model, x_train, x_dot_train, x0, H0):
model.to(DEVICE); model.train(); model.init_params()
optim = Adam(model.parameters(), lr=LEARNING_RATE, weight_decay=WEIGHT_DECAY)
train_losses = []
print("Step No. : Loss (Squared L2 Error)")
for idx_step in range(NUM_TRAIN_STEPS):
x = get_batch(x_train, idx_step, BATCH_SIZE, requires_grad=True)
x_dot_true = get_batch(x_dot_train, idx_step, BATCH_SIZE)
loss = train_step(model, optim, x, x_dot_true, idx_step)
train_losses.append(loss)
# fit integration constant
x = get_batch(x0, 0, 1)
Hx_true = get_batch(H0, 0, 1)
# MLP inside HNN outputs H(x)
Hx_pred = model.mlp(x)
bias = Hx_true - (Hx_pred - model.mlp.linear2.bias)
model.mlp.linear2.bias = torch.nn.Parameter(bias)
model.cpu()
return train_losses
hnn = HNN(2, NUM_HIDDEN_NEURONS)
t0 = time()
train_losses = adam_train(hnn, x_train, x_dot_train, x0_train, H0_train)
t1 = time()
print(f"ADAM Training took {(t1-t0):.2f} seconds")
Click to see the code for evaluation
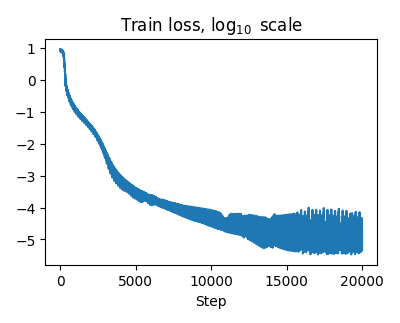
fig, ((ax)) = plt.subplots(1, 1, figsize=(4, 2*GOLDEN_RATIO), dpi=100)
ax.plot(list(range(1, NUM_TRAIN_STEPS+1)), np.log10(train_losses))
ax.set_xlabel('Step')
ax.set_title(r'Train loss, $\log_{10}$ scale')
fig.tight_layout()
fig.savefig("../../static/images/posts/training-hnns-without-backprop/hnn-training-loss.png")
def rel_l2_error(y_true, y_pred):
return np.sqrt(((y_true - y_pred)**2).sum()) / np.sqrt(((y_true)**2).sum())
y_train_pred = hnn.mlp(torch.tensor(x_train)).detach().numpy()
y_test_pred = hnn.mlp(torch.tensor(x_test)).detach().numpy()
hnn_train_error = rel_l2_error(y_train, y_train_pred)
hnn_test_error = rel_l2_error(y_test, y_test_pred)
print(f"HNN train error: {hnn_train_error:.2E}")
print(f"HNN test error: {hnn_test_error:.2E}")
When using gradient-based optimizer (e.g. Adam) we have to define many hyperparameters such as NUM_TRAINING_STEPS,
BATCH_SIZE, LEARNING_RATE, WEIGHT_DECAY, different weight initialization techniques if possible
to see which works best, or learning rate scheduler parameters if there is one. And it is a very
difficult task to tune these parameters and find the best parameters because the training itself takes
usually quite a long time. On my laptop for example the training took about 220 seconds on CPUs (16 cores)
and about 50 seconds on a GPU (NVIDIA RTX 3060 Mobile). And this is only for 8000 training points and
1000 hidden layer neurons. It usually gets more tedious when working with larger datasets and models.
Our trained HNN could approximate the target Hamiltonian with high accuracy:
HNN train error: 1.55E-03
HNN test error: 1.55E-03
and note that this is relative $L^2$ error.
HNNs are also used in many recent work with more complicated neural network architectures thus facing some challenges such as slow convergence due to the gradient-descent based iterative optimization of network parameters using backpropagation.
Sampling
Sampling refers to ‘sampling the hidden layer parameters of (deep) neural networks’. In our work we focused on the following sampling algorithms:
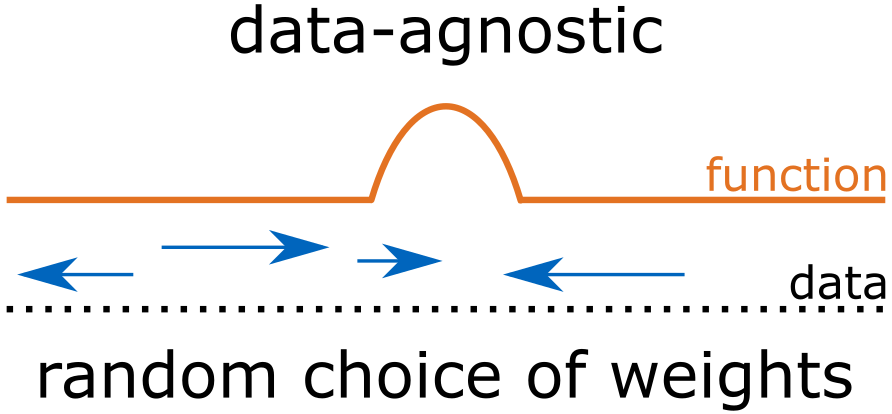
- Data-agnostic sampling – Extreme Learning Machine (ELM)
- samples the hidden layer parameters from fixed distributions: $\text{weight} \sim \mathcal{N}(0,1)$ and $\text{bias} \sim U(a,b)$ which means we are sampling all the weights and biases in the hidden layers using standard Gaussian and a fixed uniform distribution, respectively.
- Sampling of the hidden layer parameters are independent of observed data.
- Data-driven sampling – Sample Where It Matters (SWIM)4
- samples the hidden layer parameters using the SWIM algorithm which constructs each weight-bias pair using a pair of data points picked from the data space.
- Sampling of the hidden layer parameters depend on the observed data.
- Sampling uses the gradient information from observed data to construct efficient weights (focus on where the function changes the most).
Method
Sampling Hamiltonian neural networks
To make this concrete, here’s how we construct and train sampled HNNs:
- First, sample the hidden layer parameters using any of the sampling algorithms explained above,
- then solve a linear least squares problem that incorporates Hamilton’s equations for the final linear layer: $$(w^{\text{linear layer}}, b^{\text{linear layer}}) = \arg\min \mathcal{L}(\nabla \Phi, \mathcal{D}).$$
$\Phi$ is the hidden layer output of our neural network. We use the differentiable activation function $\tanh$ and therefore can compute the analytical gradient w.r.t. the input. We denote it by $\nabla \Phi$. Finally, our loss term includes the observed time derivatives and incorporates the Hamilton’s equations. You can find it in more detail in our paper if you are interested how the linear system is defined exactly.
But how do we pick data pairs for the SWIM algorithm for the sampling step? Here we have the options
- to pick the pairs uniformly: Uniform-SWIM (U-SWIM) or
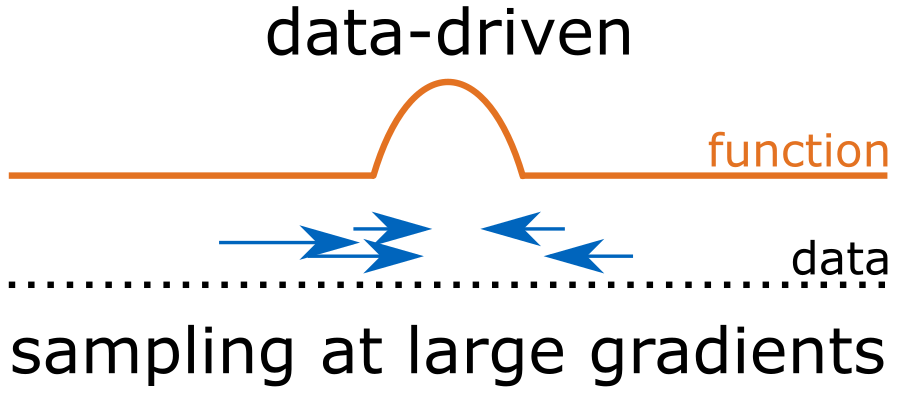
- pick the pairs at the large gradients: (SWIM).
The latter option is defined by a supervised probability distribution proportional to: $\frac{ \lVert \mathcal{H}(x^{(2)}) - \mathcal{H}(x^{(1)}) \rVert }{ \lVert x^{(2)} - x^{(1)} \rVert } $, that is, it puts more likelihood on the point pairs where the function changes more quickly (where the gradient is large). Unfortunately in real world data the Hamiltonian values (e.g. energy) is very hard to obtain. So our training set $\mathcal{D}$ does not contain the true function values, and thus this probability distribution is not available for us to use.
Approximate-SWIM sampling
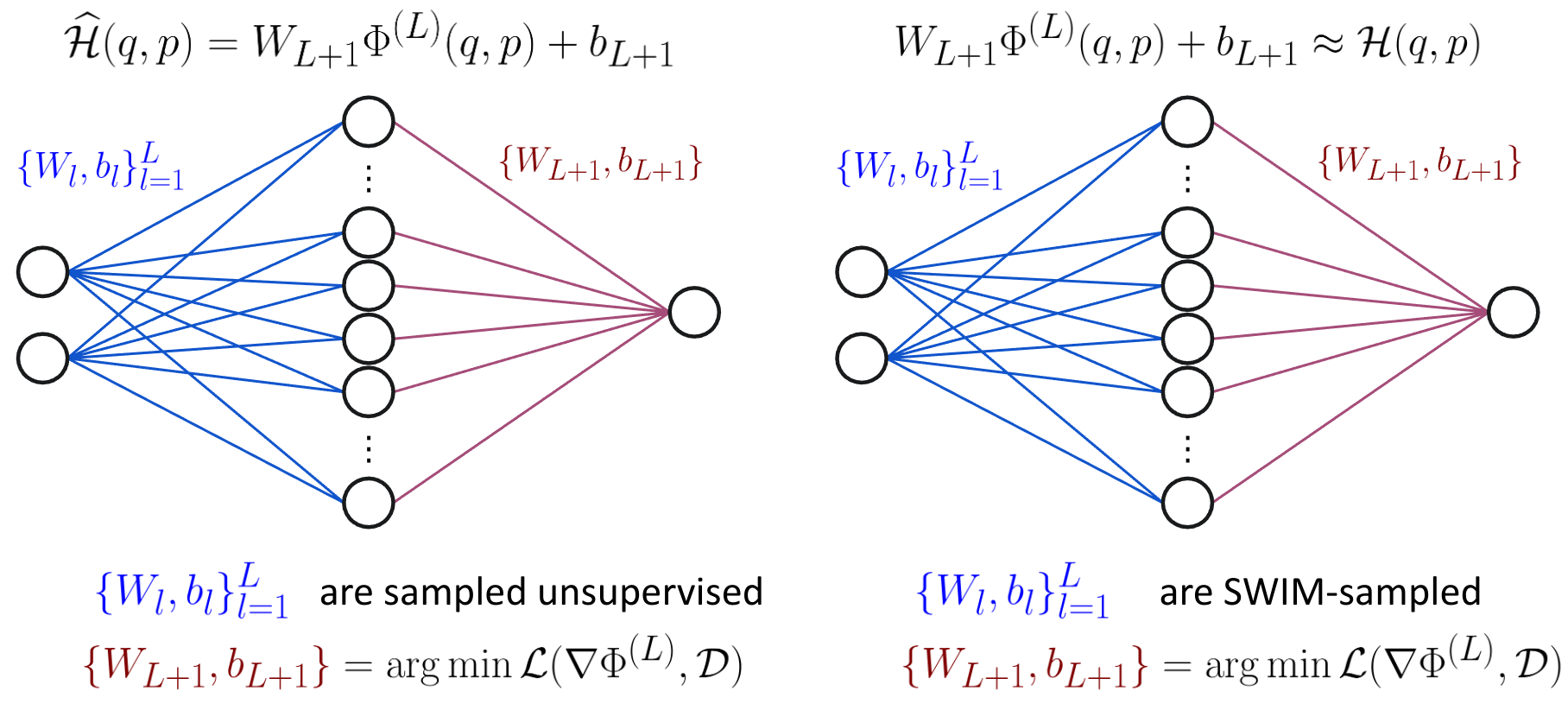
I gave the spoiler above: we can use an approximation instead for the SWIM algorithm, that is, we can use any approximation (in this work we used U-SWIM for the initial approximation) and then resample the hidden layer parameters using the SWIM algorithm and their proposed probability distribution. We called this version the Approximate-SWIM (A-SWIM). Let’s also see how we can implement sampled HNNs using the swimnetworks package. See the notebooks folder for the forked repository.
Click to see the code for imports and HNN sampling constants
from sklearn.pipeline import Pipeline
from swimnetworks.swimnetworks import Dense, Linear
SEED_MODEL = 91234 # to be used in the swimnetworks
# sampling parameters
RCOND = 1e-13
METHOD = "A-SWIM"
Click to see the code for Sampled-HNN implementation
class SampledMLP(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim):
super(SampledMLP, self).__init__()
steps = [
(
"dense",
Dense(
layer_width=NUM_HIDDEN_NEURONS,
activation="tanh",
elm_bias_start=-5.,
elm_bias_end=5.,
parameter_sampler="random",
sample_uniformly=True,
resample_duplicates=True,
random_seed=SEED_MODEL,
)
),
(
"linear",
Linear(layer_width=output_dim, regularization_scale=RCOND)
)
]
self.pipeline = Pipeline(steps)
def forward(self, x):
return self.pipeline.transform(x)
def tanh_grad(x):
# analytical gradient of tanh
return 1 - np.tanh(x)**2
class SampledHNN(nn.Module):
def __init__(self, input_dim, hidden_dim):
super(SampledHNN, self).__init__()
self.mlp = SampledMLP(input_dim, hidden_dim, 1)
def dense_grad(self, x):
# Computes the gradient of dense_layer w.r.t. x
dense_layer = self.mlp.pipeline[0]
linear_layer = self.mlp.pipeline[-1]
dense_layer.activation = tanh_grad
dense_grad = dense_layer.transform(x)
dense_layer.activation = np.tanh
# computes dense_grad
dense_grad = np.einsum('ij,kj->ikj', dense_grad, dense_layer.weights)
return dense_grad
def forward(self, x):
# Compute the Hamiltonian gradient dHdx analytically
# dense_grad * linear_weights
dense_grad = self.dense_grad(x)
linear_layer = self.mlp.pipeline[-1]
# computes dHdx = dense_grad * linear_weights
dHdx = (dense_grad @ linear_layer.weights).reshape(x.shape)
dHdq, dHdp = np.split(dHdx, 2, axis=1)
# Hamilton's Equations
q_dot = dHdp
p_dot = -dHdq
return np.hstack((q_dot, p_dot))
Click to see the code for training sampled-HNNs
def sampling_train(model, x_train, x_dot_train, x0, H0, method):
dense_layer = model.mlp.pipeline[0]
linear_layer = model.mlp.pipeline[-1]
if method == "ELM":
dense_layer.parameter_sampler = "random"
else:
dense_layer.parameter_sampler = "tanh"
dense_layer.__post_init__()
# sample hidden layer parameters (unsupervised)
dense_layer.fit(x_train)
dense_grad = model.dense_grad(x_train)
dense_x0 = dense_layer.transform(x0)
params = solve_linear_system(dense_grad, dense_x0, x_dot_train, H0)
# set linear layer weights and biases to the least-squres solution
linear_layer.weights = params[:-1].reshape((-1, 1))
linear_layer.biases = params[-1].reshape((1, 1))
# re-sample supervised if Approximate SWIM
if method == "A-SWIM":
y_pred = model.mlp(x_train)
# Sample using SWIM-proposed
# data-pair picking probability
dense_layer.sample_uniformly = False
dense_layer.fit(x_train, y_pred)
# retrain (solve least-squares) to fit
# last linear layer parameters
dense_grad = model.dense_grad(x_train)
dense_x0 = dense_layer.transform(x0)
params = solve_linear_system(dense_grad, dense_x0, x_dot_train, H0)
linear_layer.weights = params[:-1].reshape((-1, 1))
linear_layer.biases = params[-1].reshape((-1, 1))
def solve_linear_system(dense_grad, dense_x0, x_dot_train, H0):
# construct linear system A * params = b
dense_grad_q, dense_grad_p = np.split(dense_grad, 2, axis=1)
# dof=degrees of freedom, for mass-spring it is 1
(num_points, dof, hidden_size) = dense_grad_q.shape
dense_grad_q = dense_grad_q.reshape(num_points*dof, hidden_size)
dense_grad_p = dense_grad_p.reshape(num_points*dof, hidden_size)
# Hamilton's Equations
A = np.concatenate(( dense_grad_p, -dense_grad_q ), axis=0)
A = np.concatenate(( A, dense_x0 ), axis=0)
# For the bias term, add ones-column
A = np.column_stack((A, np.concatenate(( np.zeros(A.shape[0] - 1), np.ones(1) ), axis=0) ))
q_dot, p_dot = np.split(x_dot_train, 2, axis=1)
b = np.concatenate((
q_dot.ravel(),
p_dot.ravel(),
H0.ravel(),
))
params = np.linalg.lstsq(A, b, rcond=RCOND)[0]
# +1 because of linear layer bias (integration constant)
return params.reshape(-1, 1) # final shape
METHOD = "A-SWIM"
sampled_hnn = SampledHNN(2, NUM_HIDDEN_NEURONS)
t0 = time()
sampling_train(sampled_hnn, x_train, x_dot_train, x0_train, H0_train, METHOD)
t1 = time()
print(f"Sampling training took {(t1-t0):.2f} seconds")
def rel_l2_error(y_true, y_pred):
return np.sqrt(((y_true - y_pred)**2).sum()) / np.sqrt(((y_true)**2).sum())
y_train_pred = sampled_hnn.mlp(x_train)
y_test_pred = sampled_hnn.mlp(x_test)
hnn_train_error = rel_l2_error(y_train, y_train_pred)
hnn_test_error = rel_l2_error(y_test, y_test_pred)
print(f"- {METHOD}")
print(f"SampledHNN train error: {hnn_train_error:.2E}")
print(f"SampledHNN test error: {hnn_test_error:.2E}")
METHOD = "ELM"
sampled_hnn = SampledHNN(2, NUM_HIDDEN_NEURONS)
t0 = time()
sampling_train(sampled_hnn, x_train, x_dot_train, x0_train, H0_train, METHOD)
t1 = time()
print(f"Sampling training took {(t1-t0):.2f} seconds")
y_train_pred = sampled_hnn.mlp(x_train)
y_test_pred = sampled_hnn.mlp(x_test)
hnn_train_error = rel_l2_error(y_train, y_train_pred)
hnn_test_error = rel_l2_error(y_test, y_test_pred)
print(f"- {METHOD}")
print(f"SampledHNN train error: {hnn_train_error:.2E}")
print(f"SampledHNN test error: {hnn_test_error:.2E}")
Although we have implemented the SampledHNN as a torch.nn.Module this is just done for following
pytorch practices. To make a fair comparison we use the same architecture we had in the traditional
HNN: a single hidden layer, 1000 neurons in the hidden layer, and tanh activation function.
As you might have noticed, when sampling using the SWIM algorithm
we have much fewer hyperparameters to optimize compared to gradient-descent-based optimization. We
have RCOND which defines a cut-off for small singular values when doing SVD in the numpy.linalg.lstsq
method, and a METHOD parameter in our case to select A-SWIM, U-SWIM or ELM. For ELM we have
to also fix a uniform distribution to sample the hidden layer bias parameters. But if we fix our
method to A-SWIM, which actually performed the best in this example, then we only have to choose
the RCOND parameter and we are ready to sample/train our sampled-HNN! Sampling with A-SWIM
takes around 3 seconds due to the re-sampling and around 1.5 seconds with the ELM method on
my laptop on CPUs (16 cores). The resulting errors (again relative $L^2$ error is used) on the test set for
approximating the Hamiltonian are as follows:
Sampling training took 3.14 seconds
- A-SWIM
SampledHNN train error: 1.81E-11
SampledHNN test error: 1.89E-11
Sampling training took 1.38 seconds
- ELM
SampledHNN train error: 2.13E-11
SampledHNN test error: 2.15E-11
Wow! This error is very low, and this is achieved without waiting for the usual slow iterative
optimization or restarting the training because some hyperparameter did not behave well in the
optimization. Although to note, implementing a sampled network for a domain specific problem such as
Hamiltonian approximation was not very straightforward as defining traditional HNNs, but I would also
argue that after you figure out the math part it is quite simple to implement. Also for small to
medium-sized problems using the numpy.linalg.lstsq might behave well, but, for ill-conditions
problems in higher-dimensions or noisy systems one might have to carefully choose which linear
solver to use. Luckily, this field of research is still an active area and many alternative linear
solvers exist (LSQR, LSMR, …).
Now let’s recreate the plots that we created in the introduction section using our approximations and compare traditionally trained HNN against the sampled one (A-SWIM, since it is better than ELM in this toy example). We use the symplectic Euler integrator because of its conserving properties.
Click to see the code
def hnn_symp_euler(x, dt):
"""
Same as the symplectic_euler above except
this uses HNN approximated time derivatives
dxdt
"""
x_dot_pred = hnn.forward(torch.tensor([x], requires_grad=True))
dqdt = x_dot_pred.detach().numpy()[0][0]
# update q
q, p = x[0], x[1]
q_next = q + dt * dqdt
x_dot_next_pred = hnn.forward(torch.tensor([[q_next, p]], requires_grad=True))
dpdt_next = x_dot_next_pred.detach().numpy()[0][1]
# update p
p_next = p + dt * dpdt_next
return np.array([q_next, p_next])
def sampled_hnn_symp_euler(x, dt):
"""
Same as the symplectic_euler above except
this uses SampledHNN approximated time derivatives
dxdt
"""
x_dot_pred = sampled_hnn(np.array([x]))
dqdt = x_dot_pred[0][0]
# update q
q, p = x[0], x[1]
q_next = q + dt * dqdt
x_dot_next_pred = sampled_hnn(np.array([[q_next, p]]))
dpdt_next = x_dot_next_pred[0][1]
# update p
p_next = p + dt * dpdt_next
return np.array([q_next, p_next])
COLOR_ASWIM = '#28fa02' # green
dt = 1e-2
traj_length = 2000
x_0 = np.array([1.5, 0.])
symplectic_euler_traj = [x_0]
hnn_symp_euler_traj = [x_0]
sampled_hnn_symp_euler_traj = [x_0]
for _ in range(traj_length-1):
x = symplectic_euler_traj[-1]
x_next = symplectic_euler(x, dt)
symplectic_euler_traj.append(x_next)
x = hnn_symp_euler_traj[-1]
x_next= hnn_symp_euler(x, dt)
hnn_symp_euler_traj.append(x_next)
x = sampled_hnn_symp_euler_traj[-1]
x_next = sampled_hnn_symp_euler(x, dt)
sampled_hnn_symp_euler_traj.append(x_next)
symplectic_euler_traj = np.array(symplectic_euler_traj)
hamiltonian_values = spring_hamiltonian(symplectic_euler_traj)
hnn_symp_euler_traj = np.array(hnn_symp_euler_traj)
hnn_hamil_values = spring_hamiltonian(hnn_symp_euler_traj)
hnn_l2_errors = np.linalg.norm(symplectic_euler_traj - hnn_symp_euler_traj, axis=-1)
sampled_hnn_symp_euler_traj = np.array(sampled_hnn_symp_euler_traj)
sampled_hnn_hamil_values = spring_hamiltonian(sampled_hnn_symp_euler_traj)
sampled_hnn_l2_errors = np.linalg.norm(symplectic_euler_traj - sampled_hnn_symp_euler_traj, axis=-1)
fig, ((ax0, ax1, ax2)) = plt.subplots(1, 3, figsize=(12, 2*GOLDEN_RATIO), dpi=100)
ax0.plot(range(1, traj_length+1), symplectic_euler_traj[:,0], label=r"$q$", linewidth=7)
ax0.plot(range(1, traj_length+1), symplectic_euler_traj[:,1], label=r"$p$", linewidth=7)
ax0.plot(range(1, traj_length+1), sampled_hnn_symp_euler_traj[:,0], label="A-SWIM", color=COLOR_ASWIM, linewidth=3, linestyle="dashed")
ax0.plot(range(1, traj_length+1), sampled_hnn_symp_euler_traj[:,1], color=COLOR_ASWIM, linewidth=3, linestyle="dashed")
ax0.plot(range(1, traj_length+1), hnn_symp_euler_traj[:,0], label="HNN", color="black", linestyle="dotted", linewidth=3)
ax0.plot(range(1, traj_length+1), hnn_symp_euler_traj[:,1], color="black", linestyle="dotted", linewidth=3)
ax0.set_title(r"Symplectic Euler")
ax0.set_xlabel(r"time step")
ax0.legend()
ax1.plot(range(1, traj_length+1), hamiltonian_values, linewidth=7, label="True")
ax1.plot(range(1, traj_length+1), sampled_hnn_hamil_values, linestyle='dashed', color=COLOR_ASWIM, linewidth=3, label="A-SWIM")
ax1.plot(range(1, traj_length+1), hnn_hamil_values, linewidth=3, color="black", linestyle="dashed", label="HNN")
ax1.set_xlabel(r"time step")
ax1.set_title(r"$\mathcal{H}(q,p)$")
ax1.legend()
ax2.set_title(r"$L^2$ error in $log_{10}$ scale")
ax2.plot(np.log10(hnn_l2_errors), label="HNN", color='k')
ax2.plot(np.log10(sampled_hnn_l2_errors), color=COLOR_ASWIM, label="A-SWIM")
ax2.set_xlabel(r"time step")
ax2.legend()
fig.tight_layout()
fig.savefig("../../static/images/posts/training-hnns-without-backprop/comparison-plot.png")
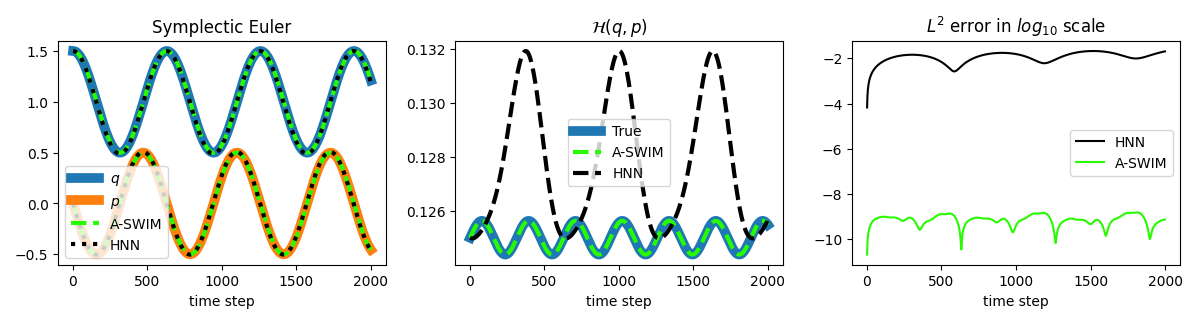
Middle: Trajectory approximations and the conservation of the Hamiltonian value along the trajectory.
Right: $L^2$ distance is plotted between the approximated and ground truth trajectories.
We can clearly see sampled HNNs outperforming traditionally trained HNNs in the mass-spring system example (about five orders of magnitude more accurate trajectory approximation).
I hope the above examples gave you intuitions on how easy it is to train sampled HNNs compared to the traditional ones. And if you followed along the code that’s great, you can now approximate any Hamiltonian system using these methods from scratch!
Now let’s also take a quick look at the other systems we have experimented with, in the paper!
Results
In this section I will briefly summarize our key findings from our paper. The focus is on:
- the accuracy of the sampled HNNs compared to their traditionally trained alternative,
- the speedup we get by sampling HNNs instead of traditionally training them,
- comparison of the data-agnostic and data-driven sampling algorithms on different Hamiltonian functions.
Accuracy: Traditional HNNs vs. Sampled HNNs
| System name | Domain | HNN | ELM | (A-)SWIM |
|---|---|---|---|---|
| Single pendulum | $[-2\pi, 2\pi] \times [-1, 1]$ | 2.17E-03 | 1.49E-11 | 3.62E-10 |
| Single pendulum | $[-2\pi, 2\pi] \times [-6, 6]$ | 7.37E-04 | 9.82E-08 | 1.55E-09 |
| Lotka-Volterra | $[-2, 2] \times [-2, 2]$ | 2.35E-03 | 3.04E-12 | 1.48E-10 |
| Lotka-Volterra | $[-5, 5] \times [-5, 5]$ | 1.38E-03 | 1.02E-08 | 7.99E-09 |
| Lotka-Volterra (shifted) | $[0, 8] \times [0, 8]$ | 2.63E-03 | 3.27E-06 | 1.51E-08 |
The table above summarizes the relative $L^2$ errors of the approximations for different Hamiltonian systems for the traditionally trained HNNs, ELM-sampled HNNs, A-SWIM sampled HNNs. We write (A-)SWIM because the accuracies of A-SWIM are same as the SWIM sampling method using the true function values up to the error order we list here. So, in this example using A-SWIM we could still reach the performance of the supervised SWIM algorithm in an unsupervised setting.
First thing to notice is the very accurate approximation of the sampled HNNs compared to the traditionally trained HNNs. This is partly because traditional training requires tuning of many hyperparameters, which can be usually further tuned to get better results (e.g. we did not use a learning rate scheduler here) but this is also one of the advantages of the sampling methods: Sampling HNNs requires fewer hyperparameters to optimize. Therefore, their training is also very simple to set up and here we empirically see that on small sized problems they can very accurately approximate the target Hamiltonian functions.
Second thing we notice is A-SWIM is more accurate than ELM when the target function has a larger domain.
Accuracy: Data-agnostic vs. Data-driven sampling
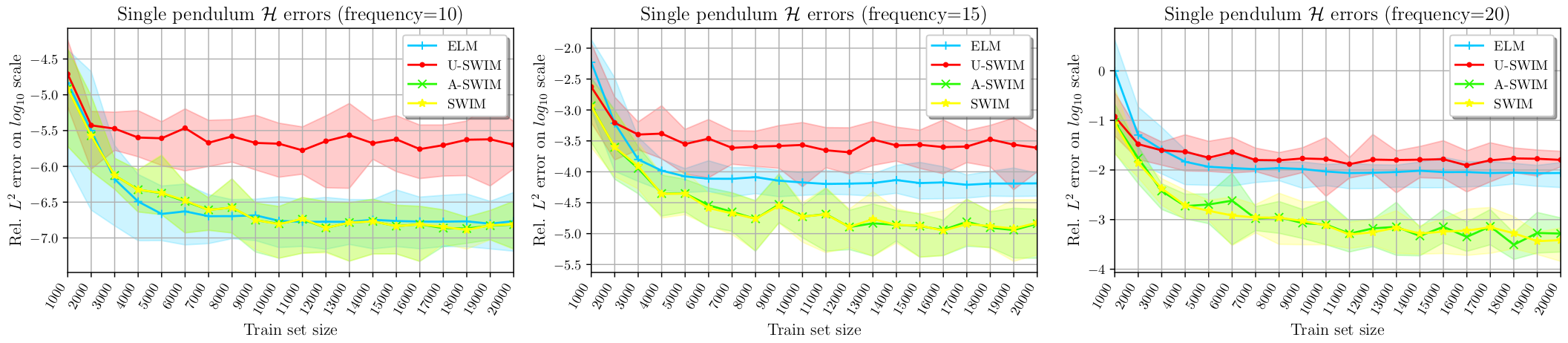
We have also set up a custom experiment for comparing different sampling algorithms. Here we can see more clearly that when the target function has large gradients (large frequency parameter) then the data-driven sampling outperforms data-agnostic sampling. And here also we see the impact of the proposed data-point sampling algorithm by the authors of SWIM. Again, our proposed A-SWIM performed very closely to the supervised SWIM algorithm without knowing the actual true function values!
Accuracy and training speed in chaotic systems
Here we list the results from approximating the chaotic double pendulum system:
| Method | Training time (s) | Rel. $L^2$ error |
|---|---|---|
| HNN | 10485.4 | 3.62E-03 |
| ELM | 43.1 | 5.69E-03 |
| A-SWIM | 85.2 | 4.08E-03 |
And the chaotic Hénon-Heiles system:
| Method | Training time (s) | Rel. $L^2$ error |
|---|---|---|
| HNN | 13140.6 | 6.68E-04 |
| ELM | 46.0 | 2.07E-02 |
| A-SWIM | 89.4 | 6.80E-08 |
And here shines the speed of sampling compared to traditional slow training of HNNs, when approximating more complex systems with more data and more wider networks. Additionally, the resulting accuracies of sampled HNNs are comparable in the double pendulum scenario and four orders of magnitude more accurate in the Hénon-Heiles system approximations.
Conclusion
Sampling makes constructing networks pretty straightforward, that’s also why working with them is really fun! You can quickly setup a function and try to approximate it using sampled networks and play around. I encourage this to get a better idea, get the code here and play around, and maybe try approximating different Hamiltonian systems that we list here and share the results!
In the future it would be really exciting to see this work extending beyond energy conserving systems (like dissipative thermodynamics consistent systems) and see the speedup from sampling where using traditional training methods of HNNs are challenging for us due to slow convergence.
Below you can find some references listed but this is not the full list. For the full list please check out the references section of our paper 2.